Phantom Hand - Glove-Controlled Animatronic Hand
Type: MECH 423 (Mechatronic Product Design) Project
Year: 2012
Teammates: Iftikhar Azam
Key Skills: C#; Arduino; Solidworks; Prototyping
Additional Information: Demonstration Video
Objectives:
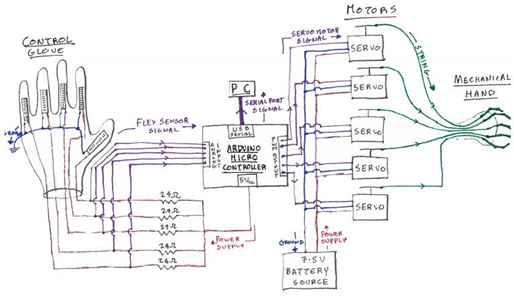
- To create a robotic hand that mimics the movement of the user’s fingers in real-time using uses a glove as the control interface. In addition, the system plays a corresponding sound note based on the finger moved.
Summary:
Worked on all aspects of the project together with my teammate.
- Generated the concept of the design and the approach.
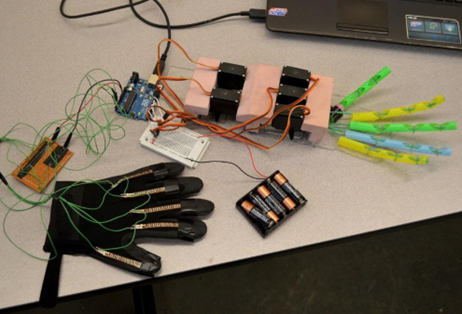
- Assembled the control glove by sewing flex sensors onto a regular glove.
- Constructed the mechanical hand using recycled prototype materials as the structure and straws and strings as the fingers.
- Mounted the five servo motors to the mechanical hand structure as the drive system.
- Programmed the Arduino micro-controller to receive, process, and output various signals.
- Constructed and assembled circuitry to connect all the components.
- Programmed a C# application that communicates with the micro-controller and plays the corresponding sound note when the signal is detected.