Act as I Say - Learning to Pretend to be Something You’re Not
Type: IFT 6163 (Robot Learning) Project
Year: 2023
Teammates: Charlie Gauthier
Key Skills: Python; Deep Reinforcement Learning; Machine Learning Pipeline; Machine Learning Libraries
Additional Information: Course Website
Objectives:
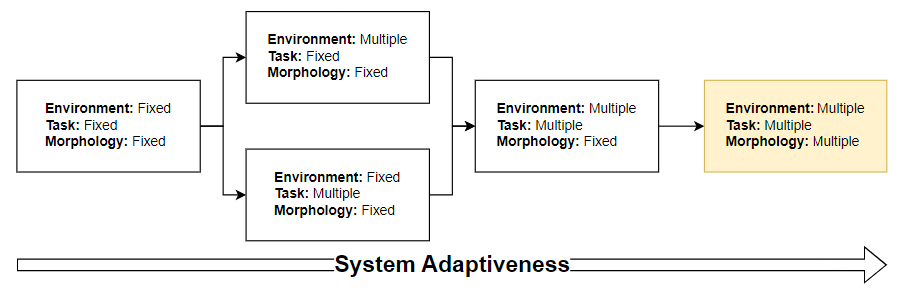
- Develop a framework for training generalized policies for controlling a morphologically adaptable robot.
Summary:
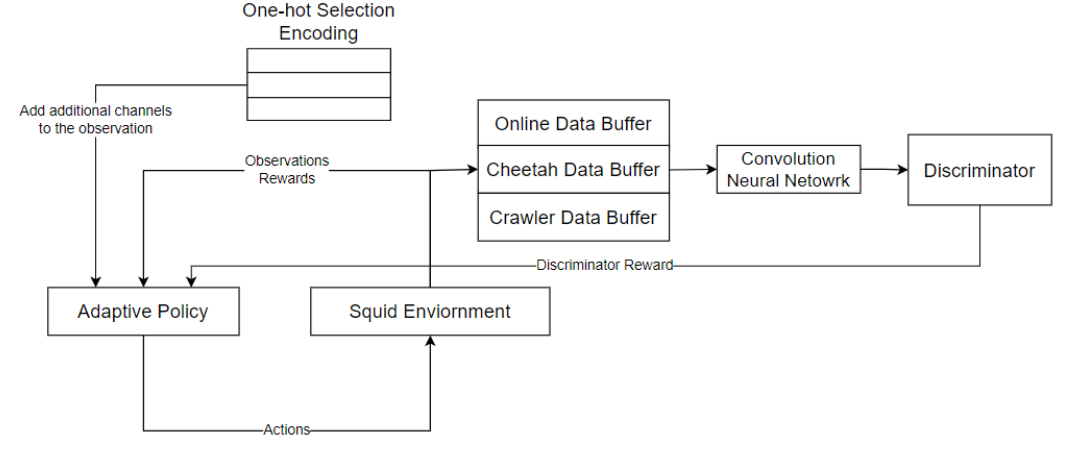
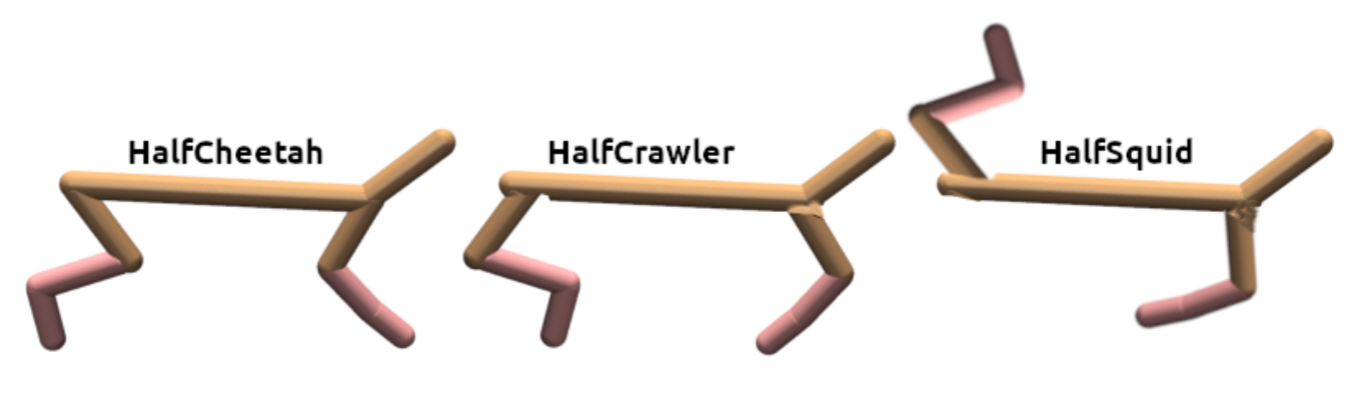
Adaptability in robotic systems is highly desirable. This project explores the method of training a generalized policy that is capable of selecting the best morphology given the goal condition. The approach borrows ideas from GAIL to provide extra training signals and from WaveNet to provide insights on the structure of the input data.
- PyTorch was used as the primary library for establishing the codebase.
- The PPO algorithm is used as the primary learning algorithm.
- Explored different simulation environments including OpenAI Gym, Mujoco, and Issac Gym.
- Developed custom models for simulation and physical experiments.